
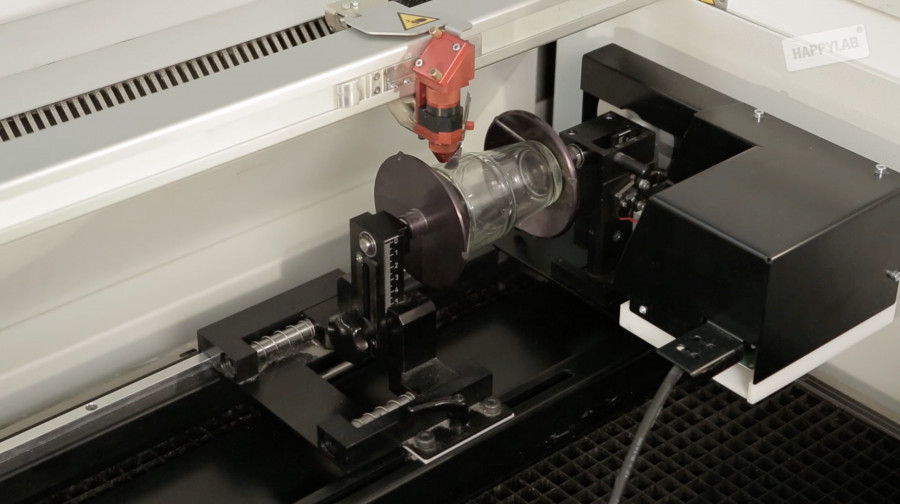
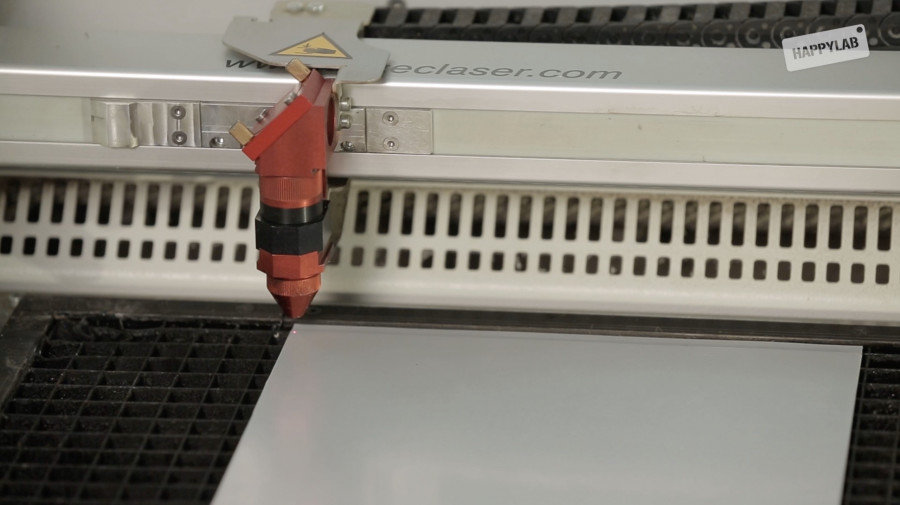
The all-round talent among the machines at Happylab! Our laser cutters can cut and engrave a wide variety of materials such as wood, cardboard, plexiglass, leather, fabric and rubber stamps with a focused infrared laser beam. In addition, there are some materials that can only be engraved - such as Glass and metal.



3D Printer & 3D Scanner
Our 3D printers use digital templates to create three-dimensional objects out of plastic. The 3D printers at Happylab Berlin work using the fused deposition modeling process (FDM). The material is heated and applied layer by layer.
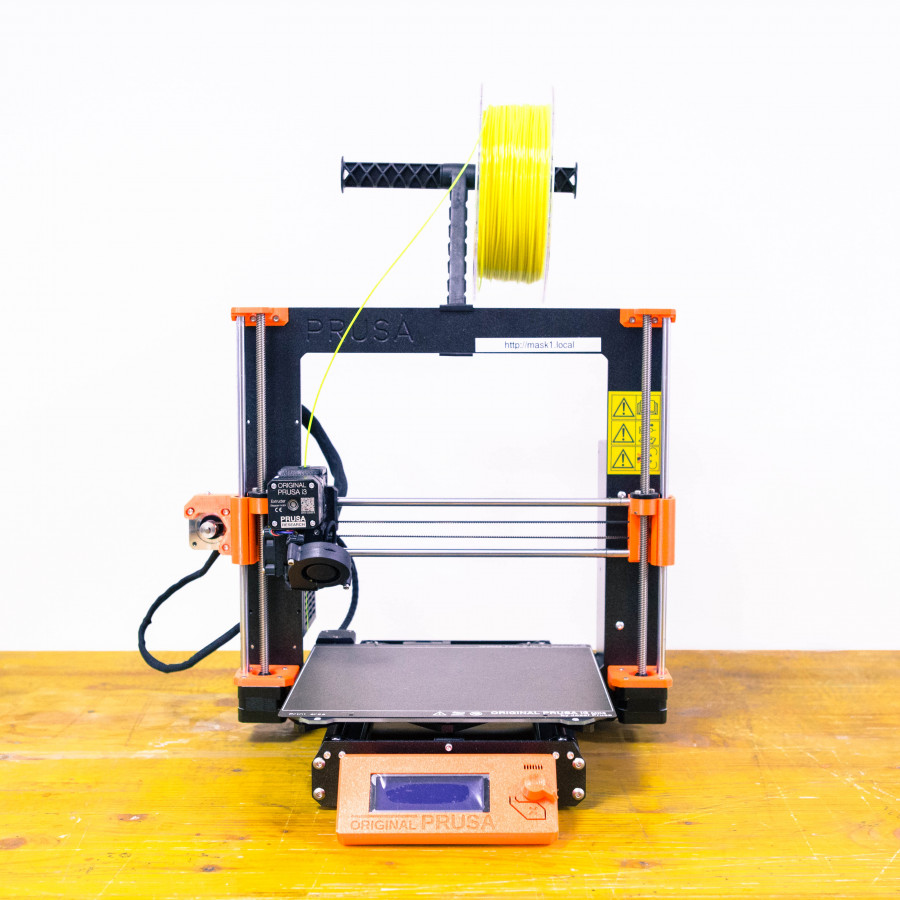 ProMakerBasic
ProMakerBasic2x Prusa i3 MK3S
DruckverfahrenFDM
MaterialPLA (div. Farben)
StützmaterialBreak Away
Druckbereich210 x 250 x 200 mm
Schichtstärke0,05 bis 0,3 mm
Tutorials
What's a 3D printer?
Online course: Software behind 3D printing (part 1)
Online course: Software behind 3D printing (part 2)
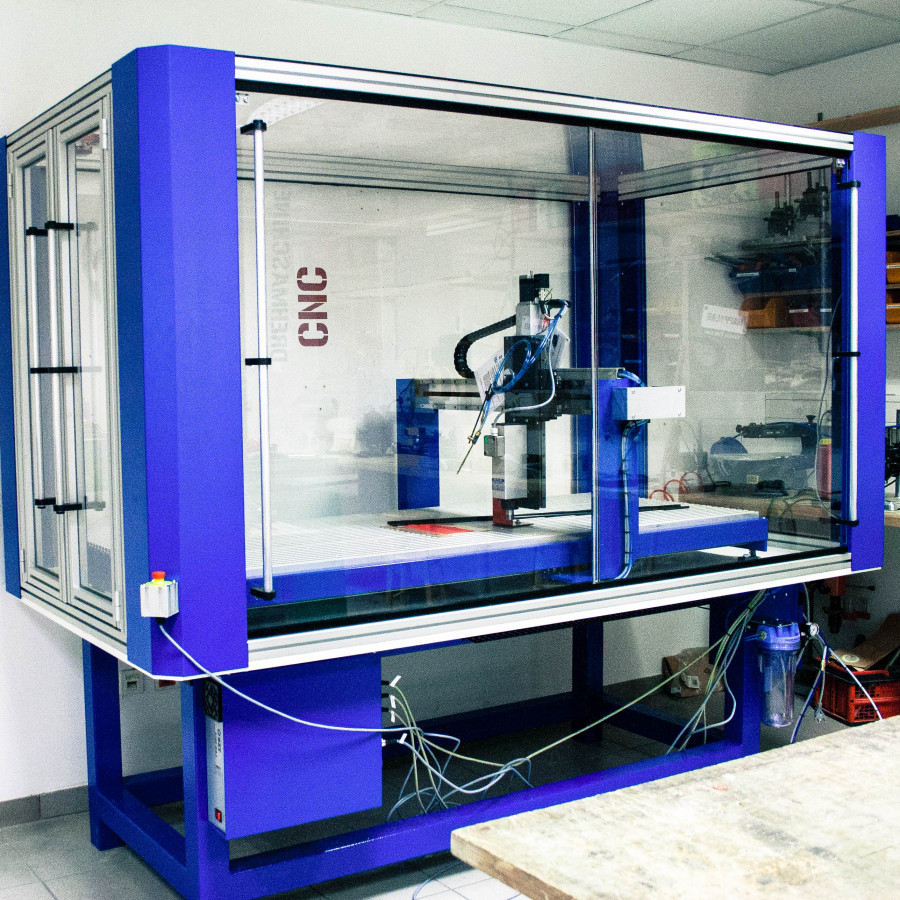
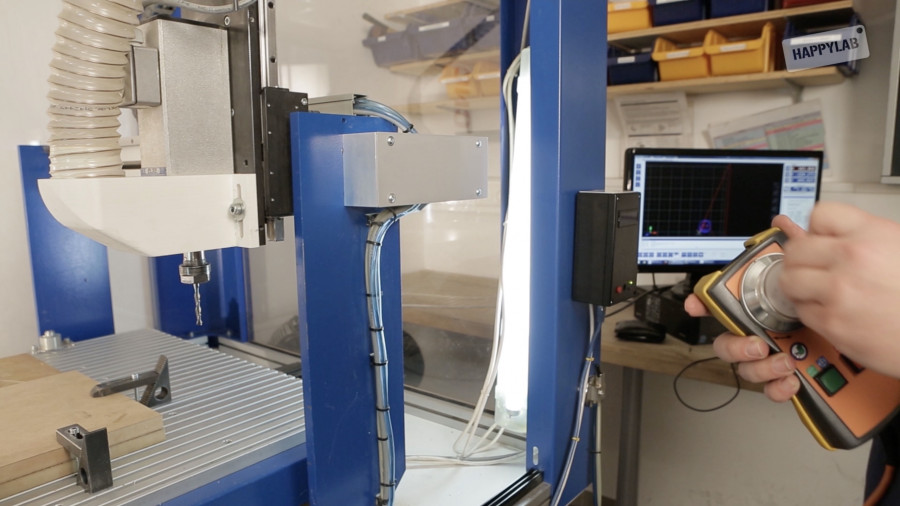
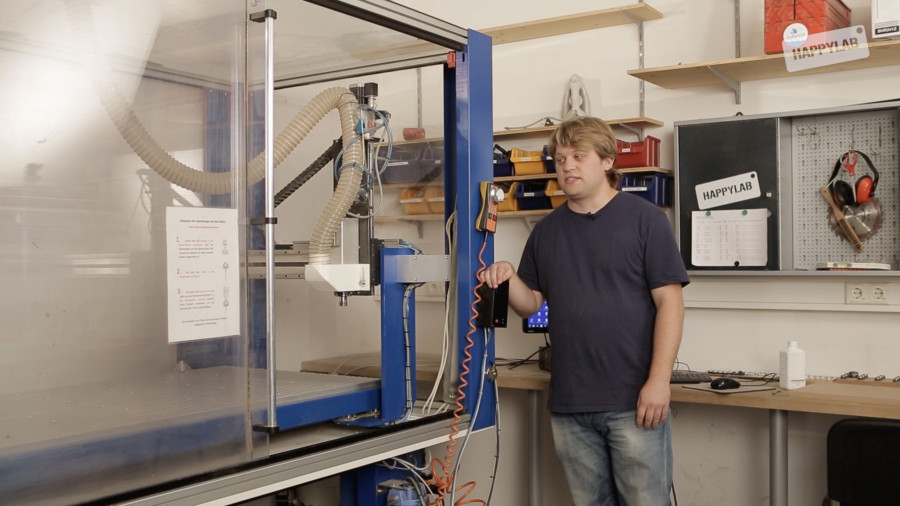
CNC Mill
The CNC milling machine is the right machine for all "tough cases" and large workpieces. Our 3-axis portal milling machine can process objects made of wood, plastic, metal and other materials. Circuit boards can also be drilled, milled and cut out automatically. A selection of milling cutters is available in our shop.
 ProMakerBasic
ProMakerBasicBZT PFK 1607 PX
Typ3-Achs Portalfräse
Verfahrweg1.668 x 750 x 250 mm
Werkzeugwechselmanuell
Tutorials
What's a CNC mill?
CNC mill training
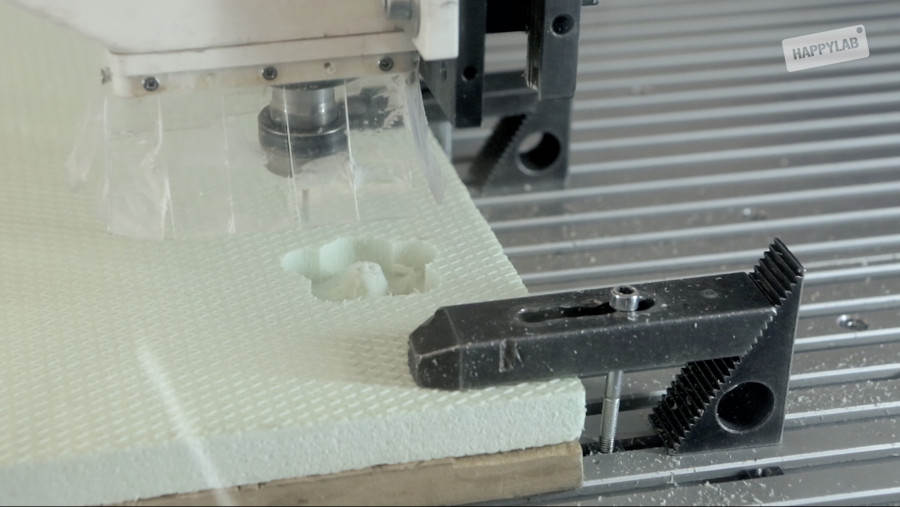
3D milling

Metal milling
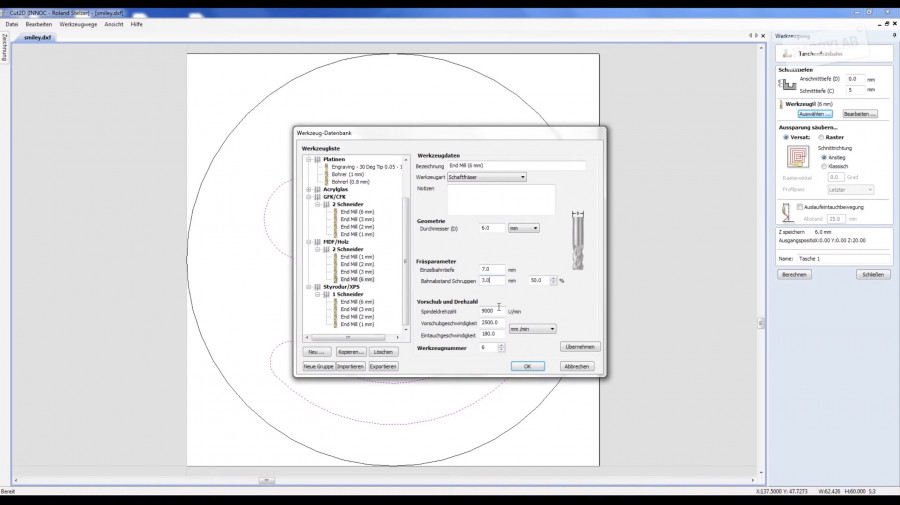
Software: Vectric Cut2D
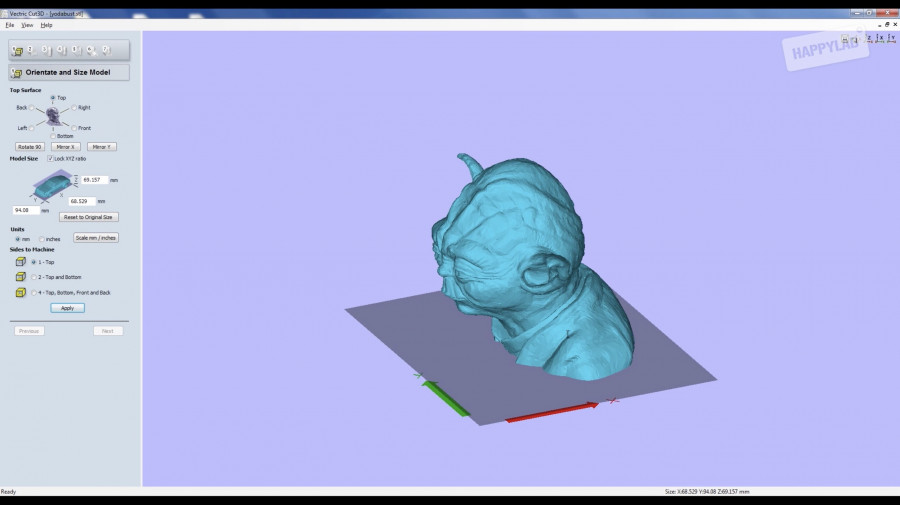
Software: Vectric Cut3D
Cutting plotter
With the cutting plotter, motifs and lettering can be cut out of film. A small knife traces the contours of the graphic without damaging the backing paper. The machine is often used for wall tattoos, adhesive lettering or for printing on textiles. A selection of adhesive and flex foils is available in our shop!
 ProMakerBasic
ProMakerBasicGCC Expert Pro 60
Schnittbreitebis 600 mm
Geschwindigkeitmax. 600 mm/s
Schneidedruckmax. 400 g
 ProMakerBasic
ProMakerBasicECO Flash MAG 3838
Arbeitsfläche38 x 38 cm
Temperaturmax. 225 °C
Arbeitsdruckmax. 250g/cm2
Textile lab
Our textile lab is equipped with a digital embroidery machine, sewing machine and overlock sewing machine. This allows you to process textiles professionally and embroider them automatically. Needles, fleece and threads in different colours are available in our shop!
 ProMakerBasic
ProMakerBasicBrother Innov-IS V3LE
Digitale Stickmaschine
Stickfläche300 x 200 mm
Geschwindigkeit1.050 Stiche/min
Garnfarben27
SoftwarePE Design Plus 2
 ProMakerBasic
ProMakerBasicBernina 325
Nähmaschine mit LCD-Display
Geschwindigkeit900 Stiche/min
Nadelpositionen9
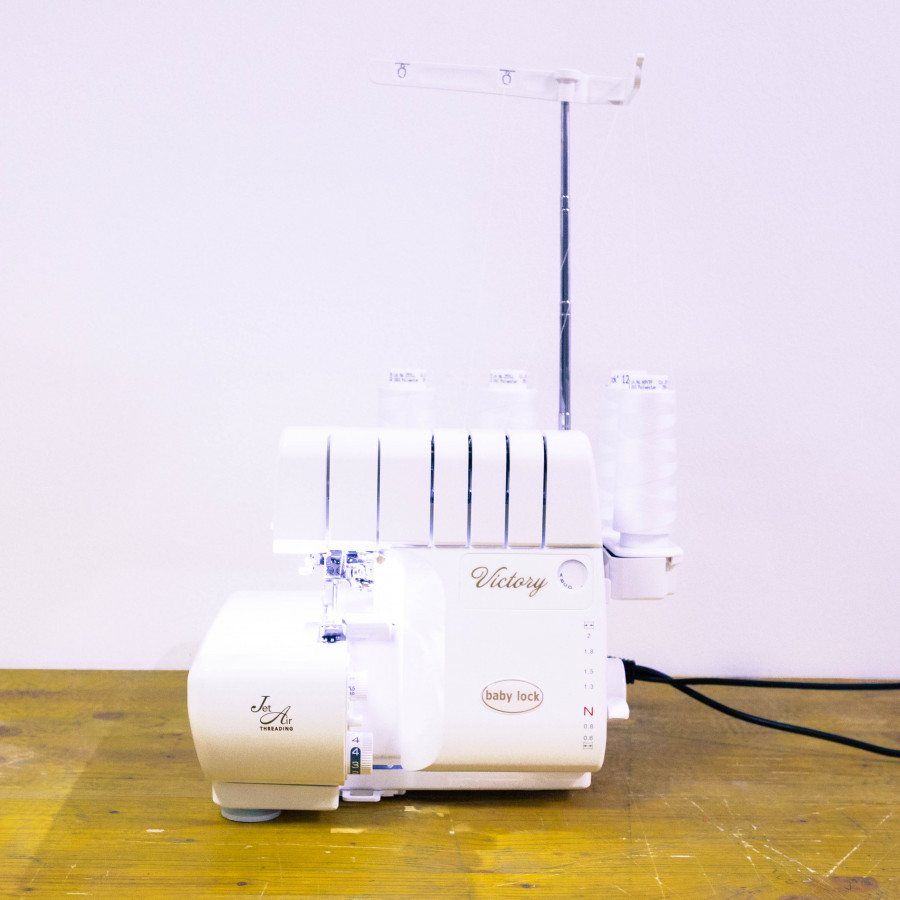 ProMakerBasic
ProMakerBasicBabylock Victory
4 Faden Overlock-Nähmaschine
EinfädelautomatikJet-Air-System
Differentialtransport für elastische Stoffe und Rüscheneffekte
Electronics & circuit board manufacturing
Our electronics workstation is equipped with the necessary equipment to easily manufacture electronic circuits. At Happylab, circuit boards can also be exposed, developed, etched and then assembled using soldering stations or reflow ovens.
No training is required to use the electronics workstation.

Laboratory Power supply Peaktech 6150

Oscilloscope ISO-TECH IDS 8204

Digital soldering station ersa i-ConPICO

Hot air soldering station ZD-939L

Digital microscope

UV exposure unit

Reflow-Oven Infrared IC Heater PUHUI T-962

Printer for exposure masks

Etch bath sodium persulfate

PCB shear

Hand press for hollow rivets

Digital multimeter UNI-T UT139C
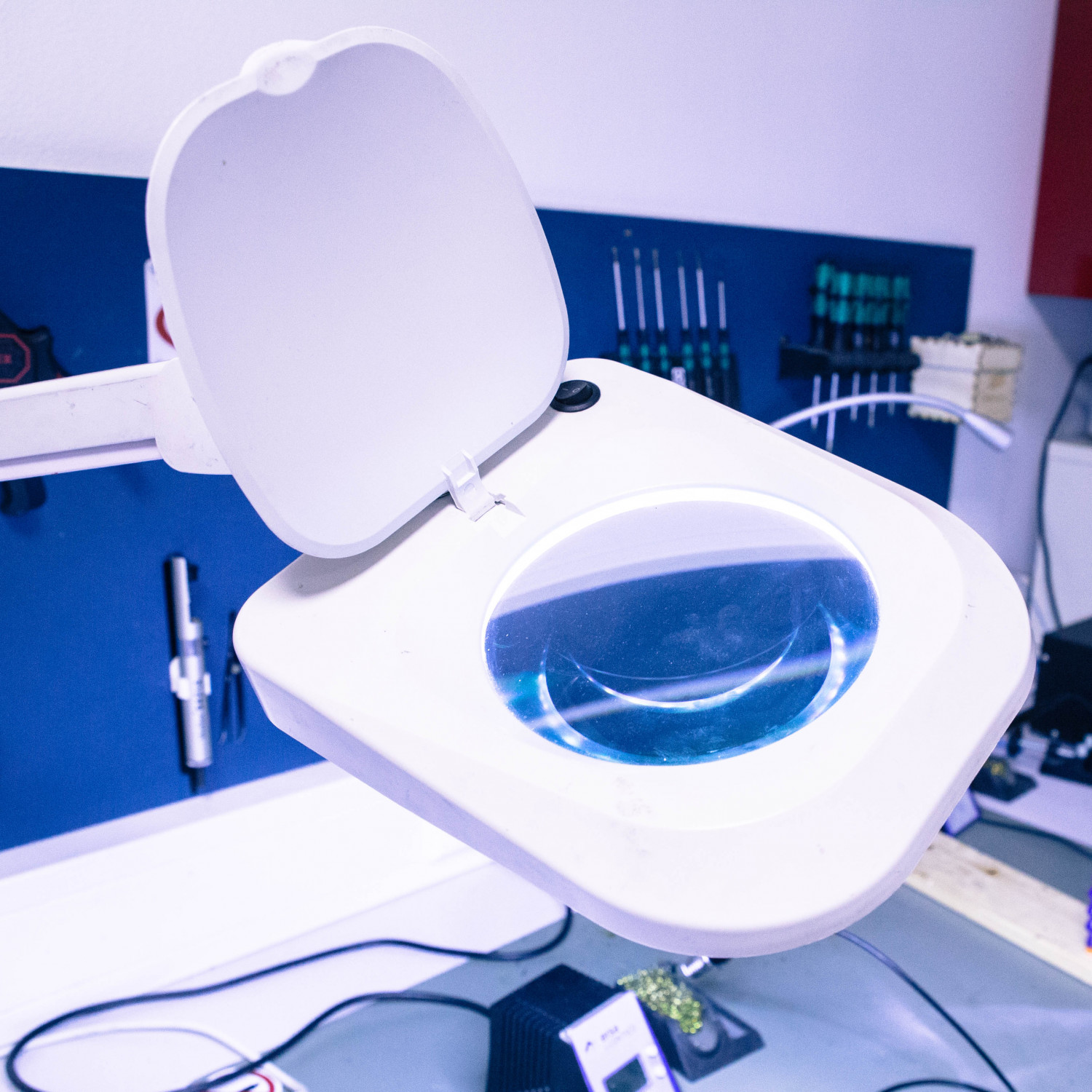
Magnifying lamp

Desoldering pump & tweezers

Pliers

Screw drivers
Workshop
In addition to all the digital production machines, Happylab also has a workshop for small wood and metal works. Our workshop is equipped with workbenches and common hand tools - from screwdrivers and drills to various saws and sanding devices.
No training is required to use the workshop.
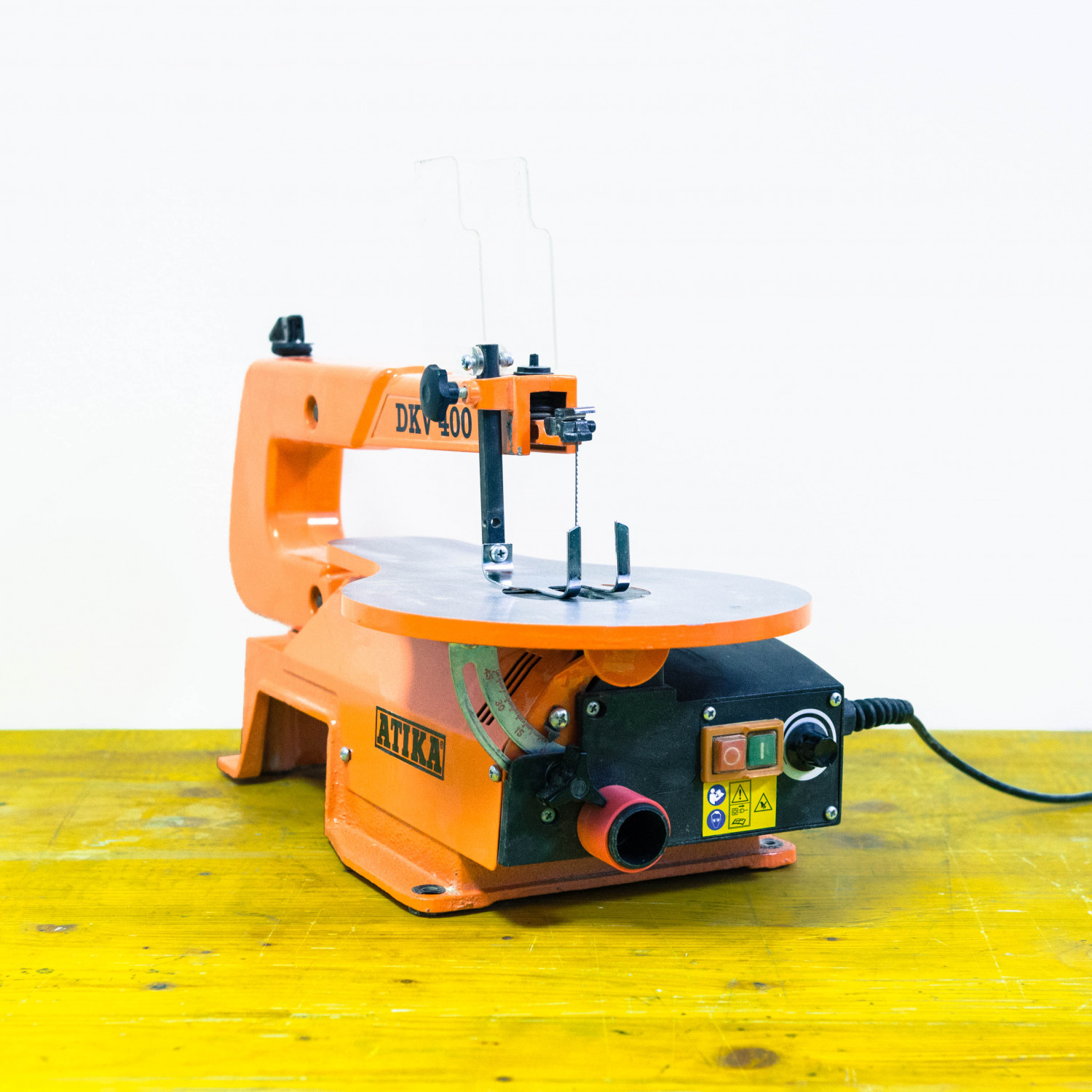
Scroll saw

Standing drill

Disc sander

Precision drill / grinder

Angle grinder

Jigsaw

Metal saw

Bolt cutter

Drilling machine

Angle tool & caliper

Hot air gun

Hot glue gun

Hand files

Clamps

Ratchets & nuts

Hex keys

Torx keys

Screw drivers

Center punch

Pliers

Hammer

Open-end wrenches

Oberfräse